OCTOPUZ releases new robotic programming software
February 13, 2019
By Manufacturing AUTOMATION
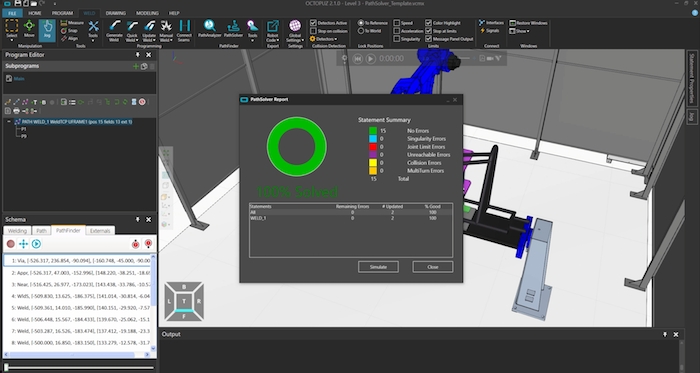 OCTOPUZ's PathSolver tool
OCTOPUZ's PathSolver tool February 13, 2019 – OCTOPUZ Inc., a Waterloo, Ontario–based simulation software provider, has introduced a new suite of tools for optimizing robotic toolpaths.
OCTOPUZ 2.1 allows for offline robotic programming with a simplified way to solve toolpath trajectories. The new OCTOPUZ PathFinder suite of tools automatically identifies and solves limits and errors within the program.
With PathFinder, users can achieve a desired path based on OCTOPUZ path intelligence and/or manual user input. PathFinder is comprised of seven tools, with two of the key tools being PathAnalyzer and PathSolver.
PathAnalyzer will automatically review original toolpaths while detecting and identifying collisions joint limits, reach limits and singularities. Using the generated report, users can self-resolve issues or allow OCTOPUZ to automatically solve on behalf of the user.
PathSolver will leverage the PathAnalyzer tool to identify limitations and systematically resolve errors and present the ideal toolpath to the user. Once the process is completed, the new toolpath can be accepted and is ready to be uploaded to the robot.
In addition, PathFinder also includes additional tools designed for auto configurations on CAM import, error visualization, targeted error resolution, foundational reference point assignment and simplified external axis configuration.
OCTOPUZ’s offline programming and simulation solutions are ideal for a wide range of industrial robots including KUKA, FANUC, ABB and Yaskawa Motoman.
Advertisement
- Zund America appoints North American new sales manager
- Workers had filed safety concerns prior to pellet plant explosion